The heliostat will be used at a UU church art show near Philadelphia, starting on 3/23.
I'm putting together the mechanism and will show progress on this page along with some background info to explain the rational for the design.
There are a number of basic heliostat designed to choose from. Some are suitable for large scale installations such as:
tpole
1. Solar II which is of the "T Pole" design. See a nice overview of power heliostat arrays:
Beyond Zero Emissions
hinge
2. The Hinge design.
2A. And the Multiple Mirror Hinge version.
clfr
3. CLFRCompact Linear Fresnel Reflector.
polaraxis
4. The Polar Axis the most common solar type. Especially for cooking. See the Scheffler Cooker heliostat:
Solare Bruecke, Scheffler's web site
receiveraxis
5. The "Receiver Axis", "Target Aligned", "Target Axis", "Spinning Elevation", "Spin Elevation", "Spin Tilt", or "Rotation Elevation" heliostat mount
rotation-elevation
Rotation-Elevation tracking mode
This is an interesting paper that describes secondary concentration on a basic Receiver Axis mount.
target-aligned
A 25M 2 TARGET-ALIGNED HELIOSTAT WITH CLOSED-LOOP CONTROL
See the 1/2 speed motion using belts.
US4192289
Receiver Axis with cabling.
heliocable1
Alternate Half Angle mechanism using a cable.
There are several mechanisms to implement Half Angle or Bisector motions in a Receiver Axis heliostat mount:
1. Slider/pantograph mechanisms as in the Silbermann.
2. The really indescribable devices like the Cloesen, Faucault, or Gambey.
I have been looking for a method that uses springs to implement the bisector function with a lightweight mirror. The problem with using 2 springs is they are usually very sensitive to offset weight and frictions. With a little more complication I found one way to do it. This mechanism uses a single spring, flexible cable, and pulleys that doesn't suffer these problems.
This mechanism is simpler to make than the slider mechanism as used in the Silbermann clock driven heliostat.
US4586488
Receiver Axis with Chains or Cog Belts.
US4149777
Heliostat Beveled Gear Angle Bisector Mechanism.
US4149777b
Heliostat Interior Gear Angle Bisector Mechanism.
Heliostat Interior Gear Angle Bisector Mechanism.
interferenz

Interferenz
A comercial receiver axis lighting product.
tourneseul

Tourneseul
A nice Receiver Axis heliostat design. I believe the main axis motor is similar to an SG-2100.
mrea2002e

Back of large Receiver Axis heliostat.
led5ddome

Dual axis LED5D5V solar tracker on large Receiver Axis heliostat.
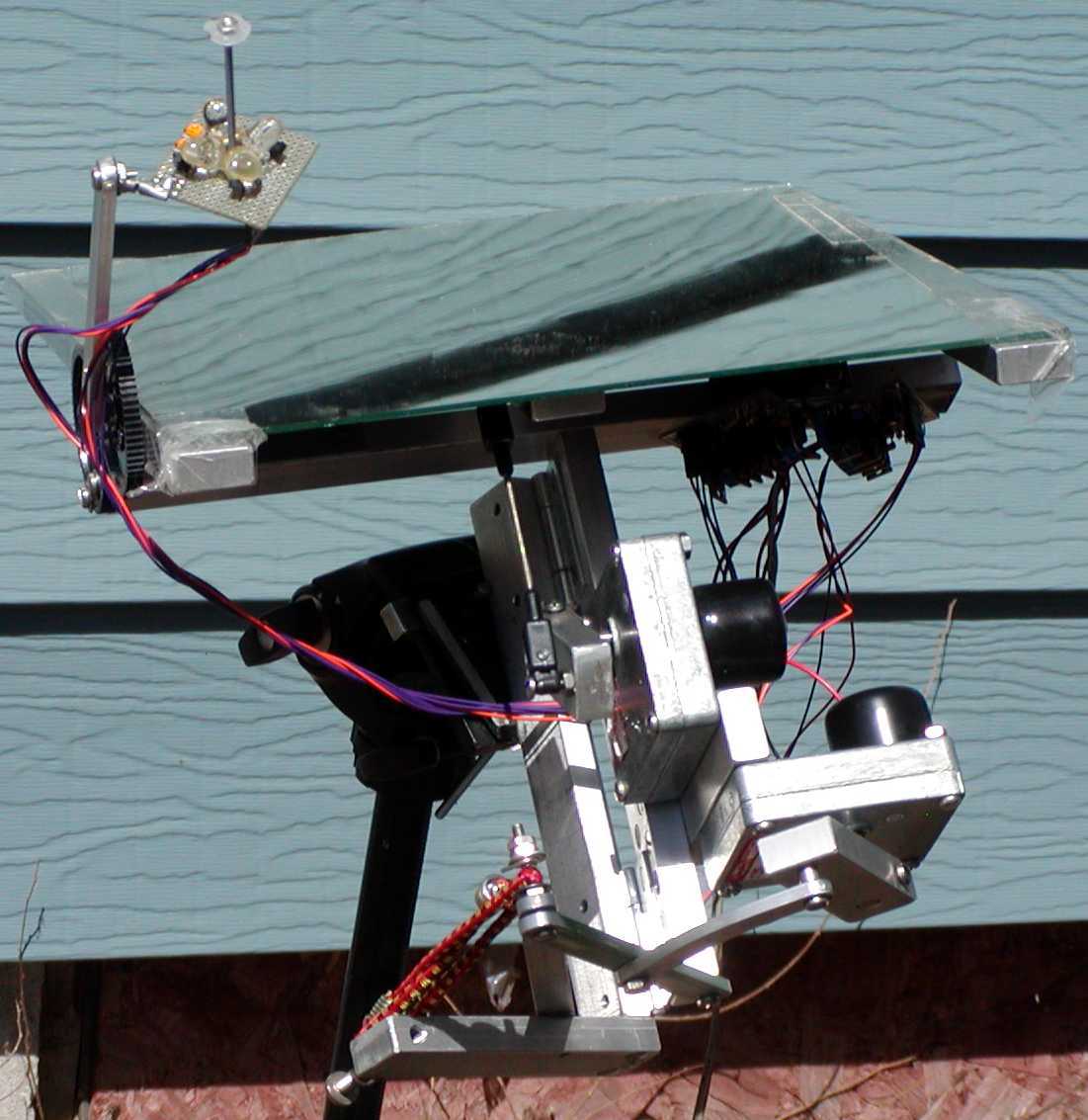
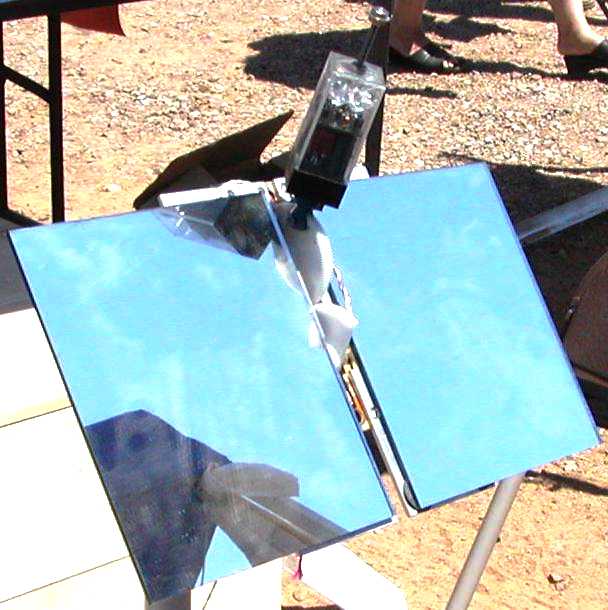
recax01

Overall View North Side.
recaxsouth1
Overall View South Side.
recax02
Closeup View.
Forgive me for the unmounted LED4 trackers.
recaxcel1

Light reflected on the ceiling.
It's pretty bright in here.
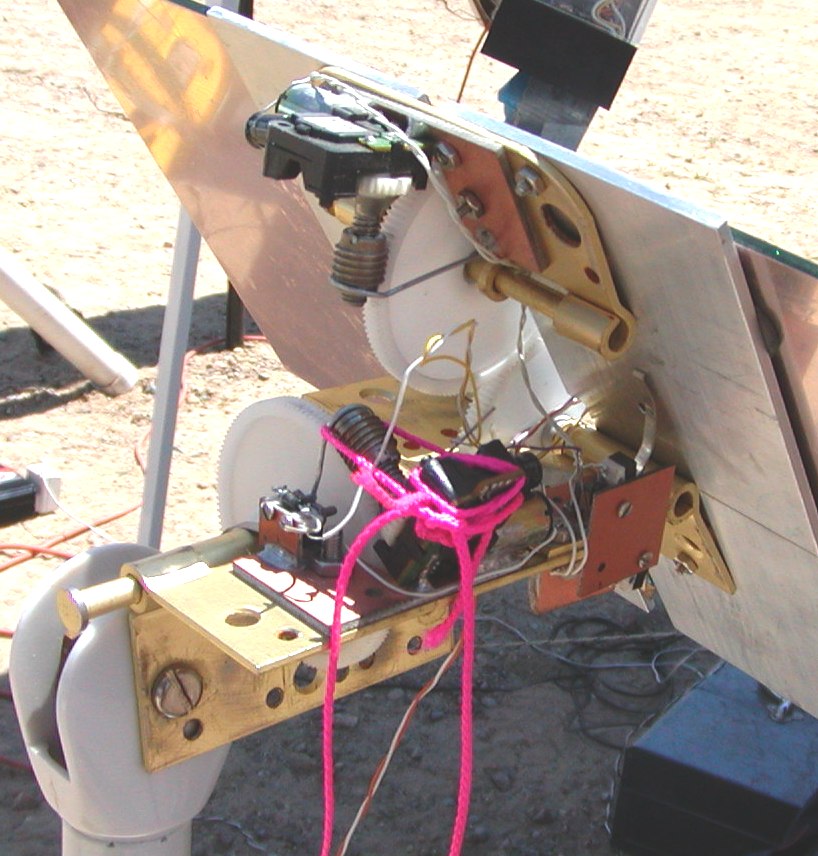
recaxshdo1
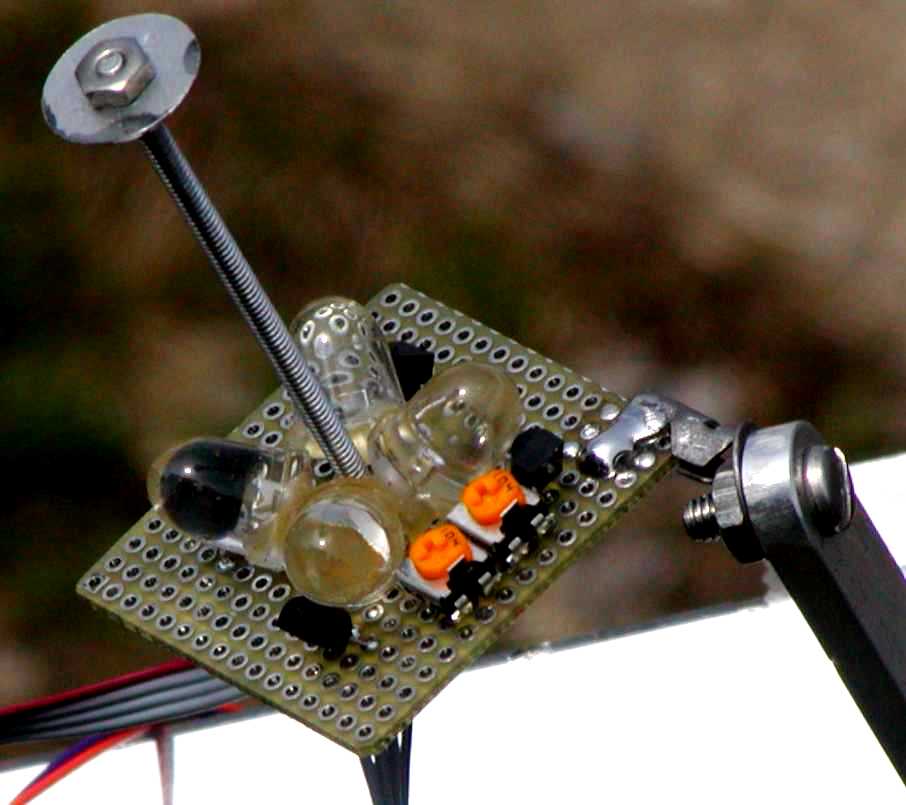
2 Axis Shadow Sensor.
The shadow device improves the pointing accuracy.
recaxgear1

2 to 1 gearing for the sensor.
Yes, it's 2 to 1. In addition to the 1 to 1 basic gears the second gear moves with the mirror tilt. The result is that the arm that the sensor is mounted to tilts twice as fast as the mirror.
1/1 + 1/1 = 2/1. Cool huh.
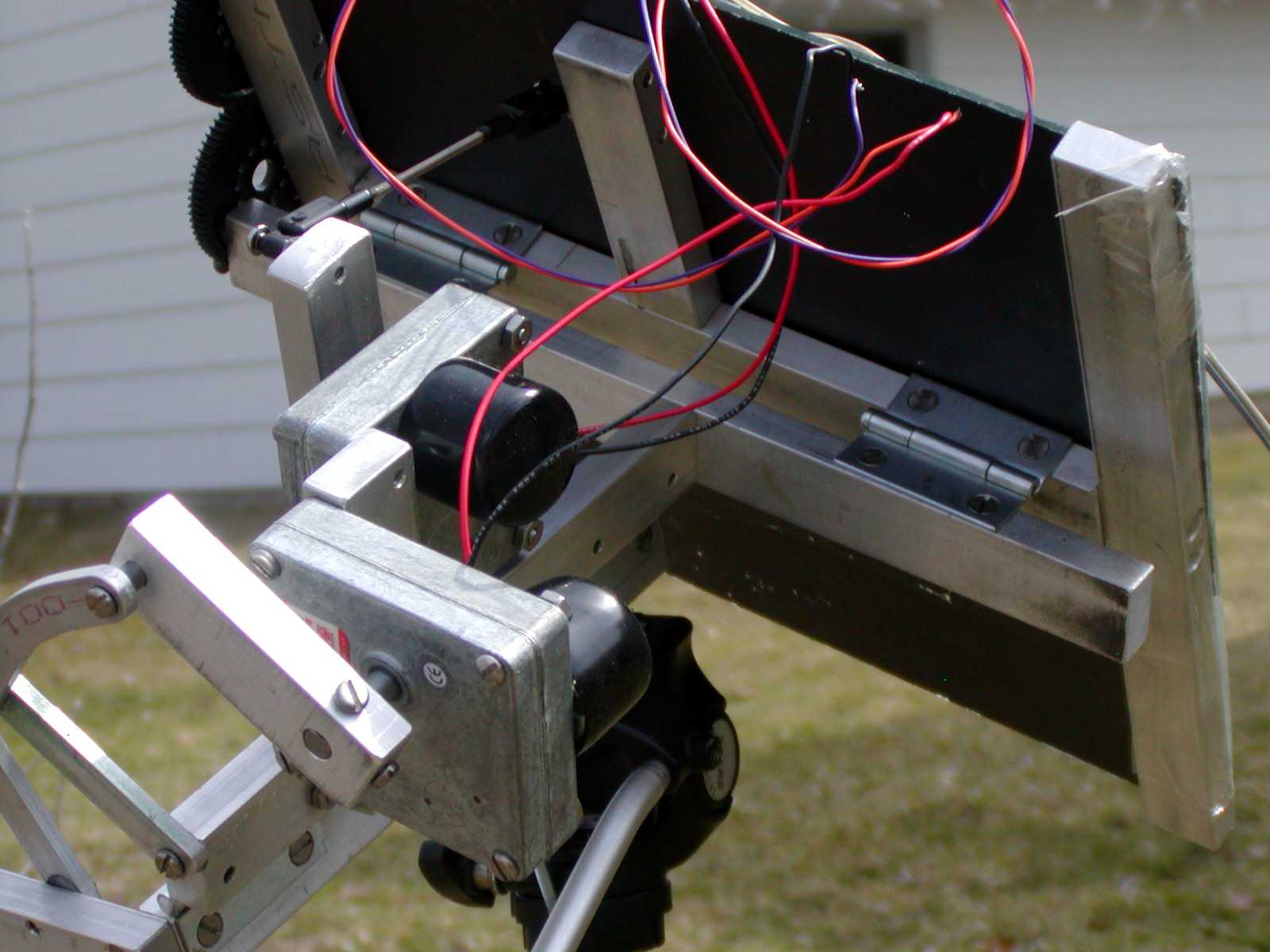
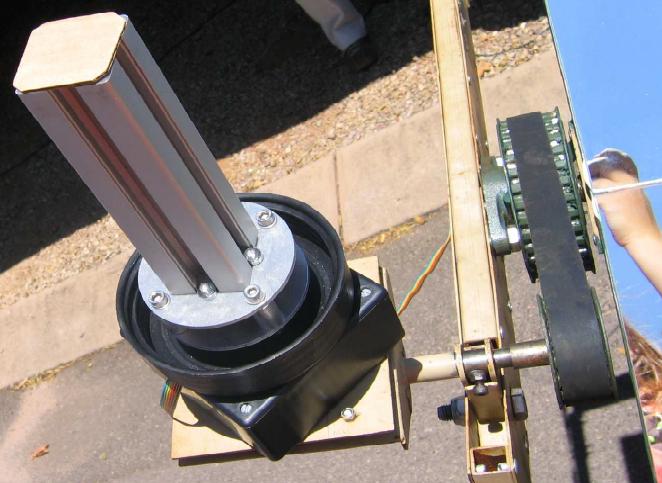
recaxrot1
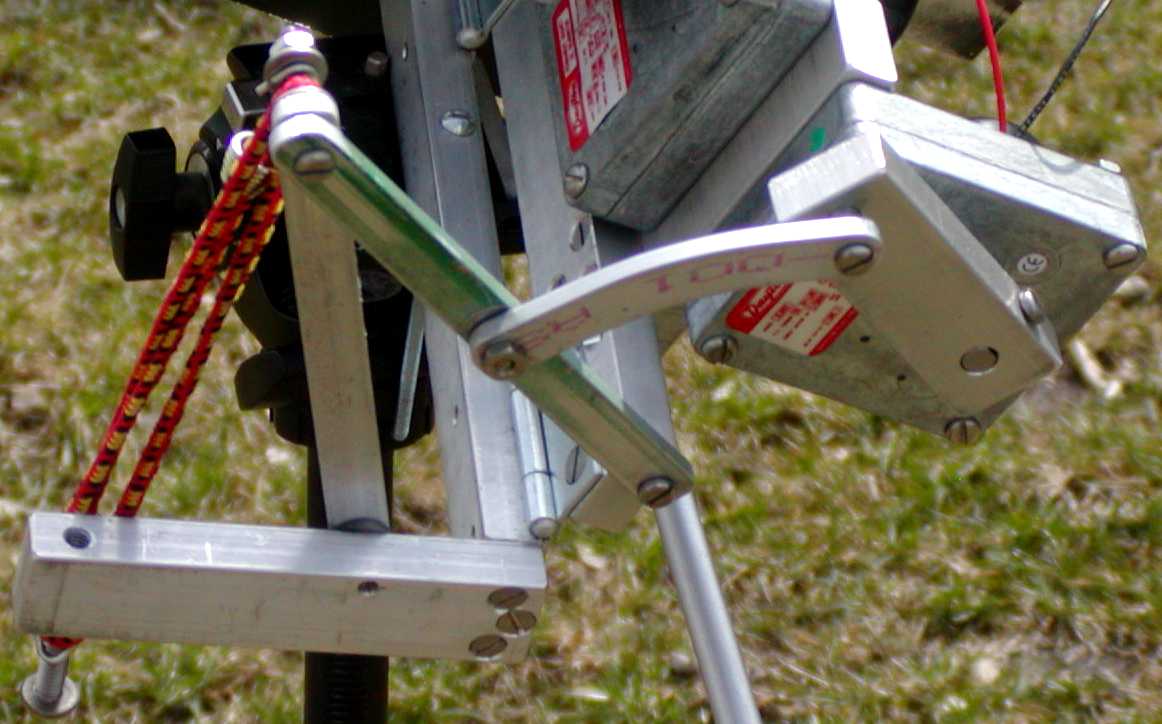
Rotation Mechanism.
This mechanism is based on the linkages used for operating the hoe on a back hoe.
hingefront
Small Heliostat.
The tracker is a dual axis LEDDSE.
hingebackleft

Small Heliostat.
The tracking mount is based on the use of door hinges.
hingebackright
Small Heliostat.
The motors are tiny 3 volt Omega gear motors.
ledse1
LEDSE Ultra Low Power Tracker.
Very cool circuit.
US4798949
Wilcox US4798949 Linear actuated optical concentrator
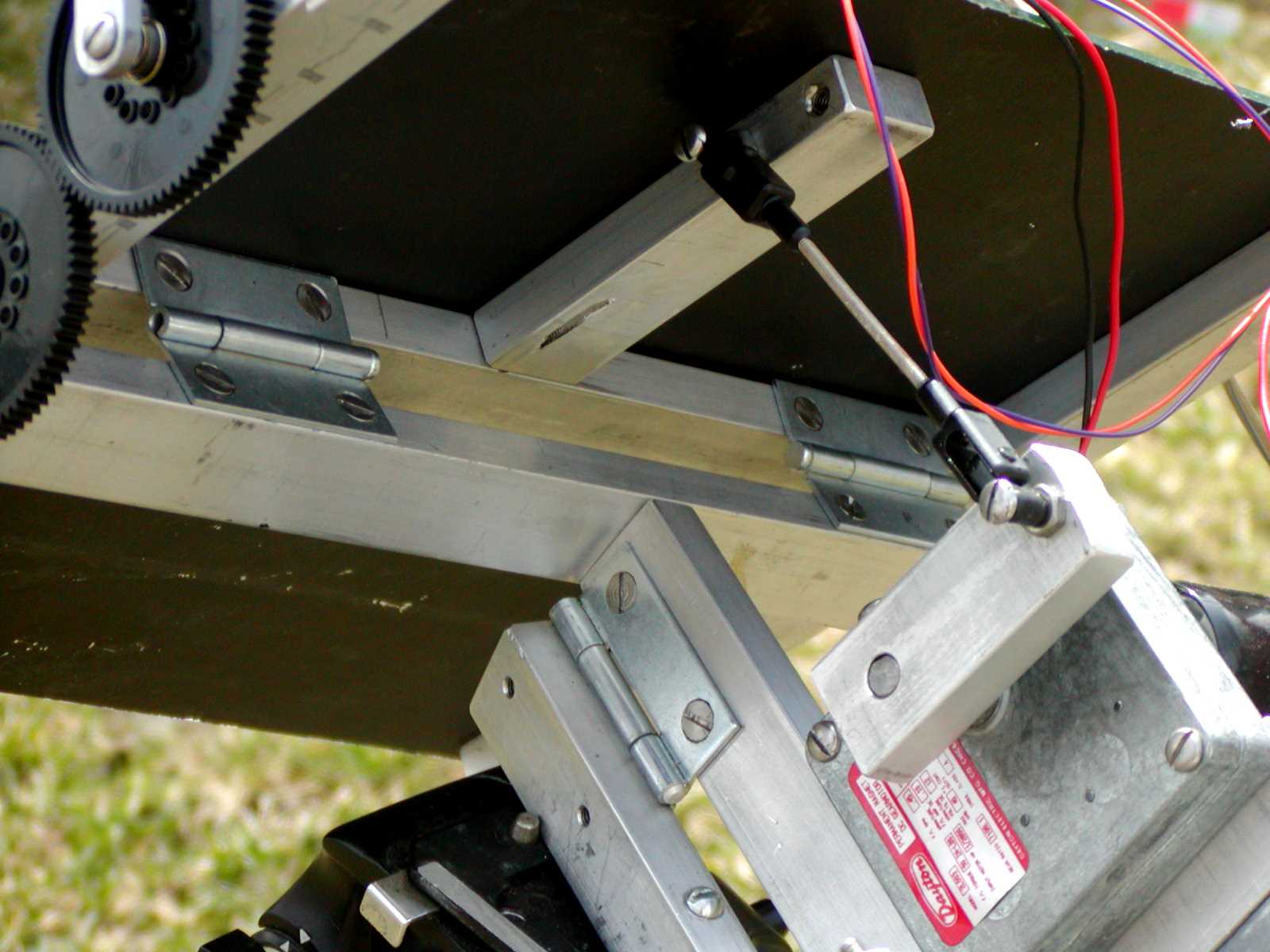
Note, the specific detail of using a universal joint where the lower, rigid arm attaches to the mirror. This U-joint prevents tipping of the mirror left or right. The two linear actuators provide tilt and rotation to the mirror.
US3945015
Gueguen US3945015 Satellite Dish Mount.
Note, there is a U-joint at the center of the reflector.
3phtam
 3Ø Tamiya model. (Hey, it looks kind of like a little robot!)
3Ø Tamiya model. (Hey, it looks kind of like a little robot!)
A picture is worth way more than a thousand words. As US4798949 and US3945015 teaches us that a U joint keeps the mirror from tipping I have a rigidly mounted U joint at the top. The other U joints could be ball joints if one can find ball joints that can take high angles.
Nick Pine's Heliostat
2l003

2L003 Gear Motor
This is a 12VDC gear motor from Grainger's. I have added the crank and push rod.
This is an off the shelf motor from Grainger's. Stock number 2L003. It's rated for .45 RPM at 50 In Lbs. It might be a little undersized for this application but this is a prototype after all.
The crank is machined from .5" x 1" aluminum bar stock. The crank has a number of offset positions for experimental adjustment. The shaft on the motor is 5/16" diameter. I have fitted 2 set screws to grip this shaft.
The push rod is a 3/8" screen door return spring. This type of spring has tightly wound wire. The spring is quite rigid and stiff. Springs are useful when designing mechanical mechanisms as they are forgiving when mistakes are made in alignment. Nothing will break if for some reason to parts run into each other. Eventually this spring can be replaced with a rigid bar, or maybe not.
I'm using a pair of LED4 solar trackers with a modified LED sensor. The sensor consists of 8 green LEDs in a crossed form. This special sensor is not the one normally supplied with the LED4. This sensor will be placed as close a practically possible in front of the mirror directly in line from the mirror to the church window.
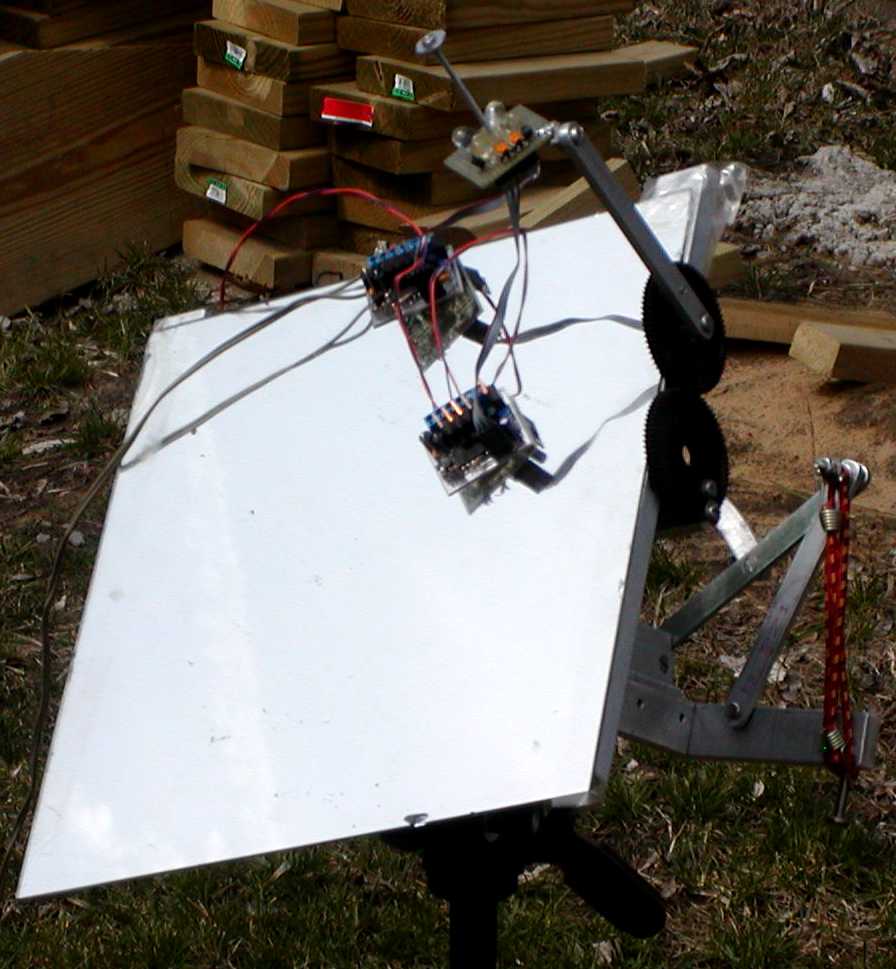
helolit01

Working out the physical layout.
helolit02
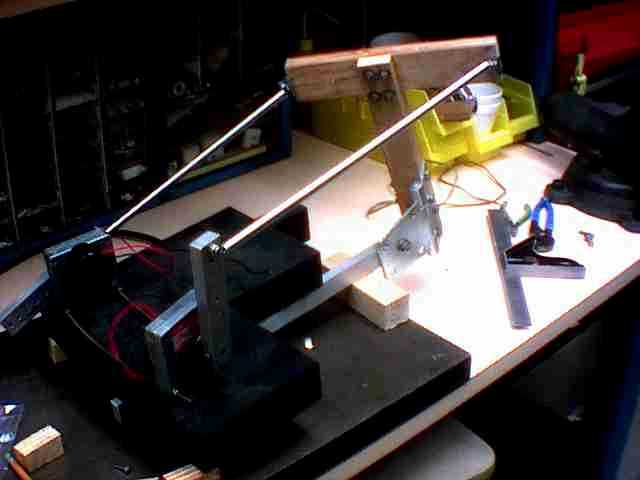
I have the mirror mount.
helolit03

And a stand for it all.
helolit04

Closeup of the motors and crank.
helolit05

Closeup of the U Joint mechanism.
In this case the U Joint is a garden fence door hinge. The wide side has a hole in it. The bolt holds the hinge plate flat against the aluminum bar yet loose enough to freely rotate.
helolit06

Prototype of 2 Axis LED Shadow Sensor.
This will be connected to the two LED4 tracker circuits.
helolit07
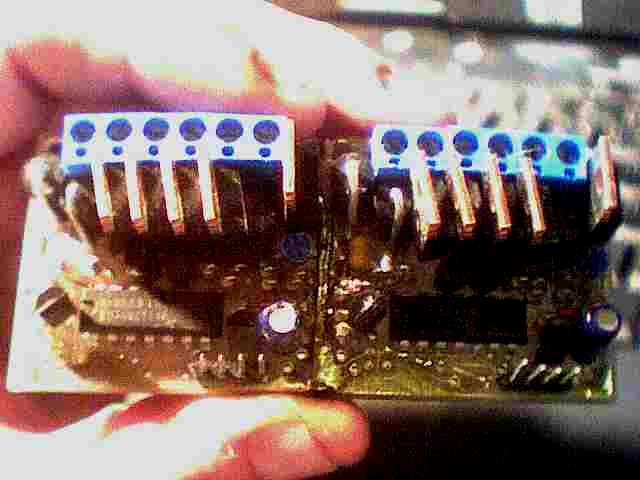
Dual LED4s.
Two LED4 tracker boards soldered together. One unit will charge the local storage battery.
helolit08

Sensor assembly.
Sensor assembly mounted to a camera tripod. The housing is a 2" black ABS plastic end cap.
helolit09

Sensor assembly.
Sensor assembly viewed reflected in the heliostat. I have removed the shadow blocker. It isn't working well and I don't have enough time to debug it. With a 4' mirror reflecting onto a 3' window at a distance of about 22' the normal tracker should be accurate enough.
antique

Antique mechanical heliostat.
dualhalfangle
Dual Half Angle type.
 Go back to Red Rock Energy.
Go back to Red Rock Energy.